Week 9:机器人与机器视觉数学基础
实验内容
本周学习机器人与机器视觉中的数学基础,包括向量、矩阵、坐标变换、旋转矩阵、机器人运动学、图像卷积和路径规划算法。
理论整理
1. 为什么机器人需要数学?
机器人需要用数学模型描述位置、姿态、速度和运动过程。
例如坐标变换可以表示机器人从一个位置移动到另一个位置。
2. 旋转矩阵
二维旋转矩阵可以表示平面中点的旋转:
R = [[cosθ, -sinθ], [sinθ, cosθ]]
3. 机器人运动学
机器人运动学主要研究机器人位置、速度和关节之间的关系。
常见内容包括正运动学、逆运动学和雅可比矩阵。
4. 机器视觉数学
机器视觉中常用图像矩阵、卷积、特征提取等方法处理图像信息。
5. 路径规划
常见路径规划算法包括 BFS、Dijkstra、A*、RRT 和 DWA。
编程验证
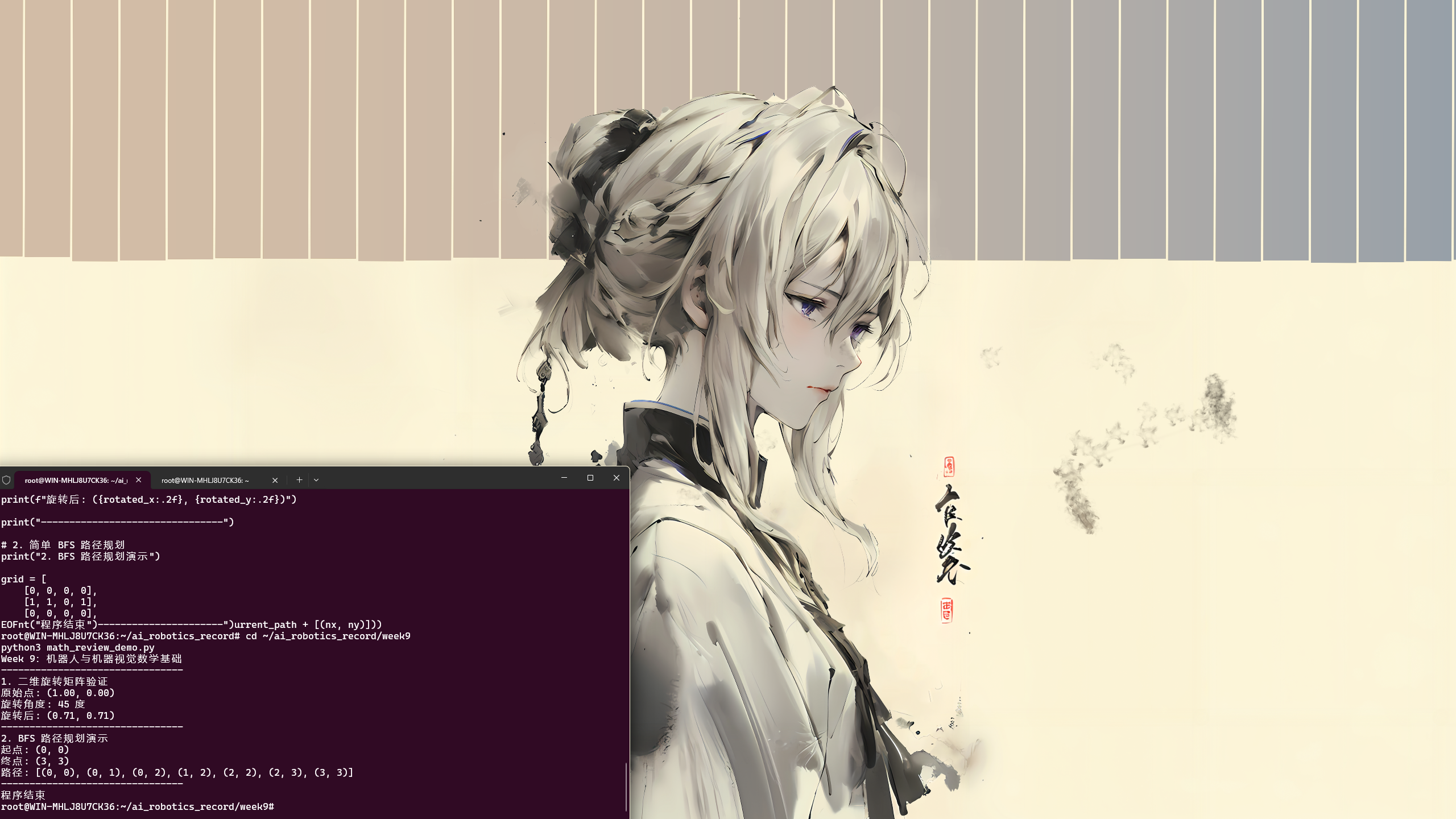
本周使用 Python 编写数学验证程序,完成二维旋转矩阵计算和简单路径规划演示。
运行命令:
python3 math_review_demo.py
实验截图
数学计算运行结果
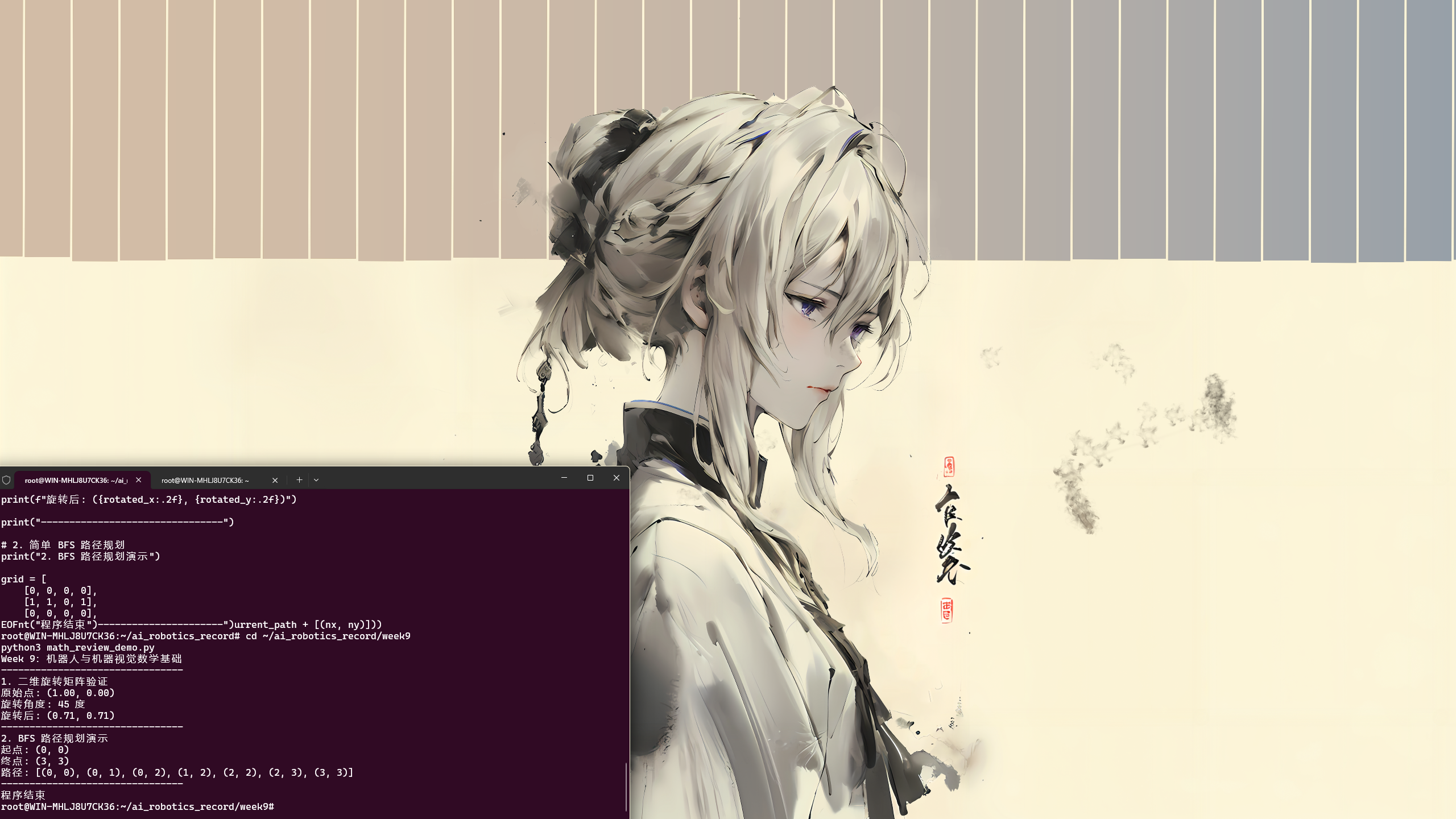
路径规划结果
总结
通过本周学习,我理解了机器人和机器视觉中常用的数学基础,并通过 Python 程序验证了旋转矩阵和路径规划的基本思想。