Week 8:Docker 安装与 ROS2 桌面容器
实验内容
本周学习 Docker 的基本作用,并使用 Docker 运行 ROS2 桌面环境。通过浏览器访问 VNC 页面,可以在容器中使用图形界面的 ROS2 环境。
理论整理
1. Docker 的作用
Docker 可以把运行环境封装到容器中,减少不同电脑和系统之间的环境差异。
2. 为什么 ROS2 适合使用 Docker?
ROS2 依赖较多,不同系统安装时容易出现版本问题。
使用 Docker 可以快速获得统一环境,方便课堂实验和项目复现。
3. 本周使用的访问地址
运行 ROS2 桌面容器后,可以在浏览器中访问:
http://127.0.0.1:6080/
实验过程
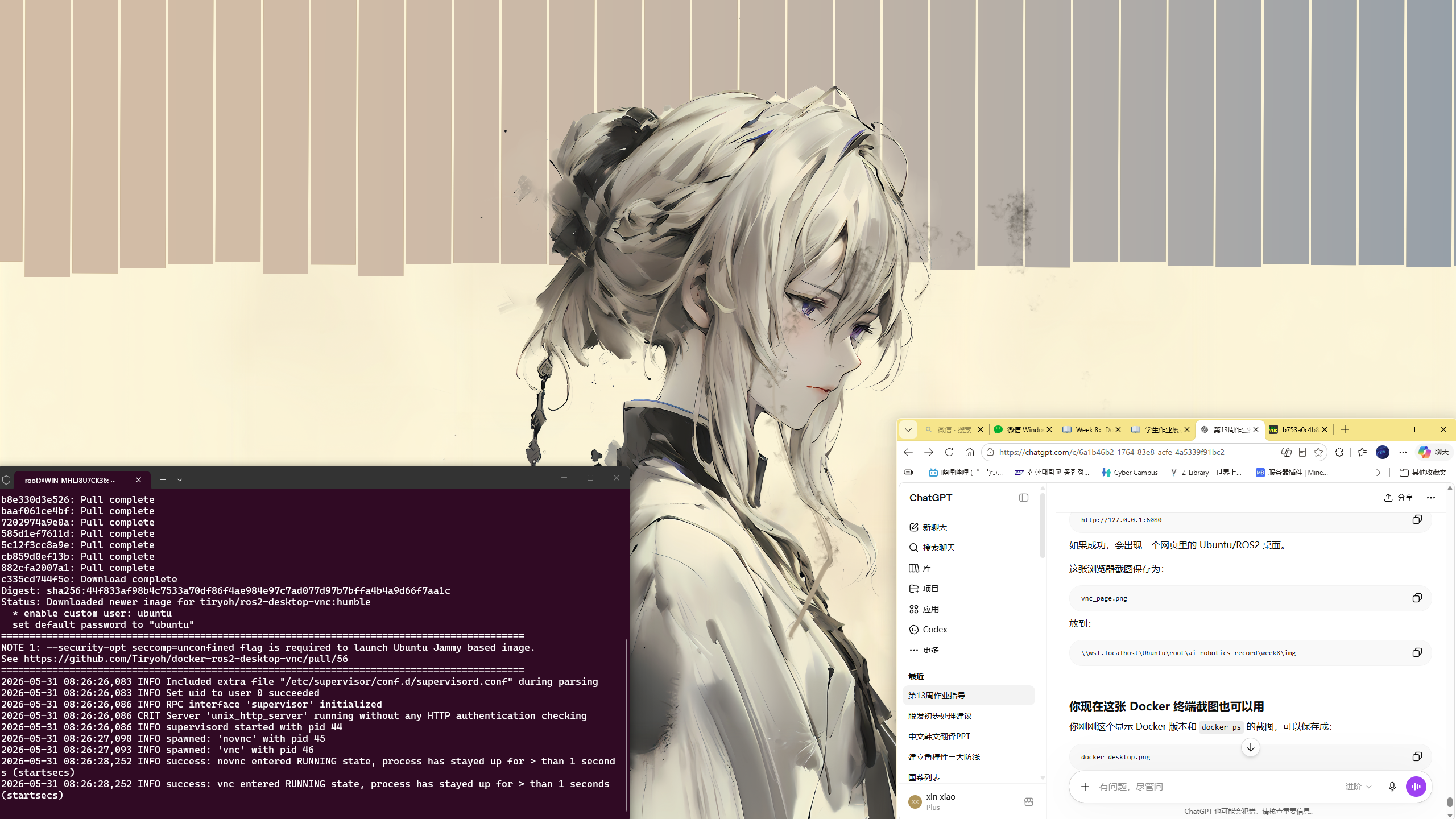
1. 启动 Docker ROS2 桌面容器
课堂参考项目:
https://github.com/Tiryoh/docker-ros2-desktop-vnc
2. 浏览器访问 ROS2 桌面
访问地址:
http://127.0.0.1:6080/
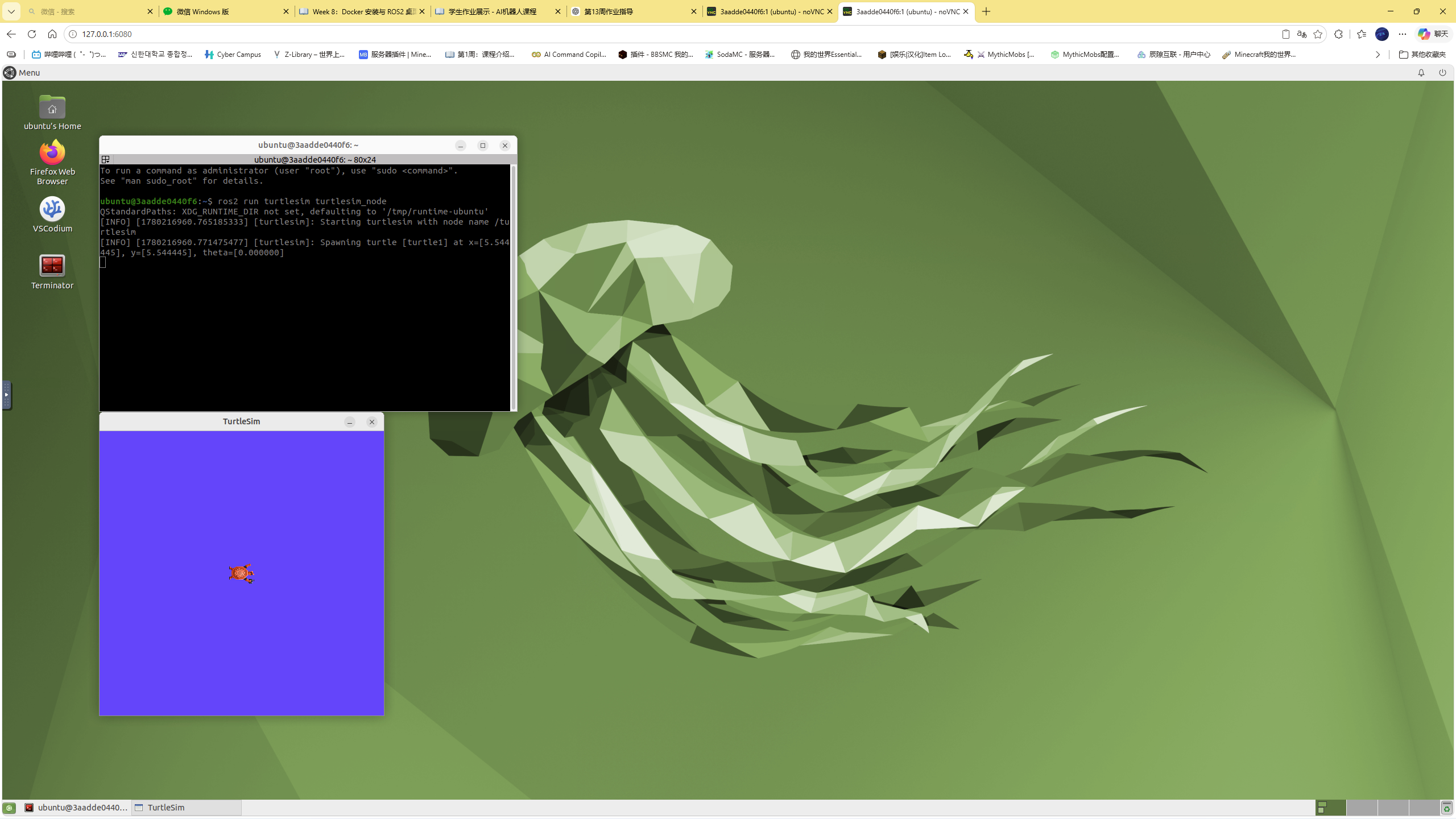
3. 在容器中运行 turtlesim
运行小乌龟:
ros2 run turtlesim turtlesim_node
运行键盘控制:
ros2 run turtlesim turtle_teleop_key
实验截图
Docker 运行 ROS2 桌面
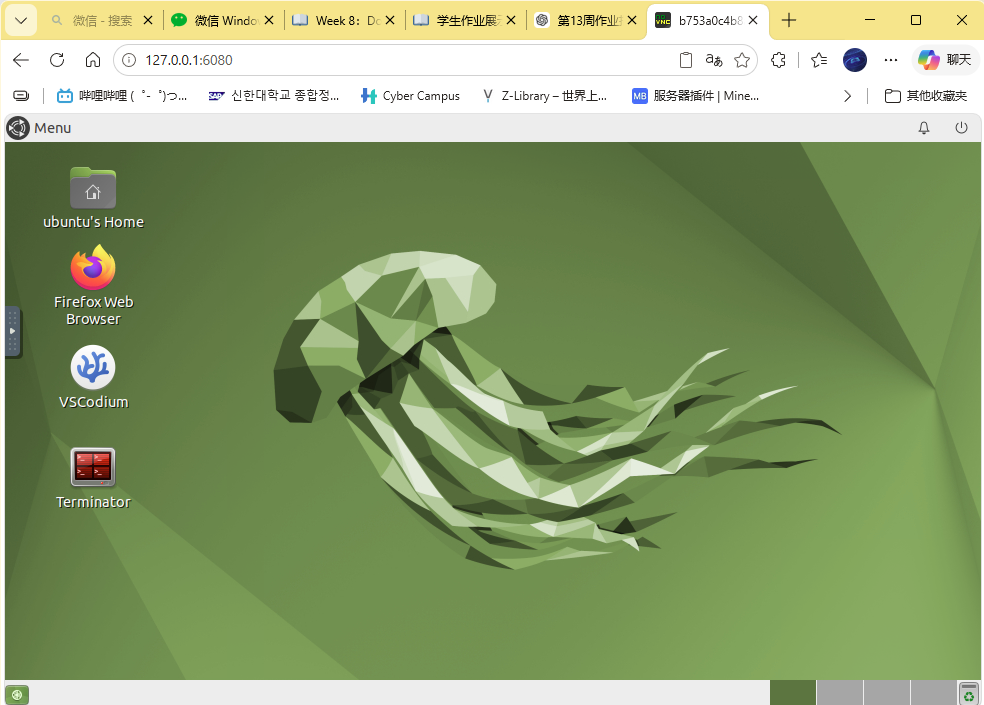
浏览器访问 VNC 页面
Docker 中运行 turtlesim
总结
通过本周实验,我了解了 Docker 容器的基本作用,并学习了如何通过 Docker 运行 ROS2 图形桌面环境。Docker 可以减少本机环境差异,使 ROS2 实验更加稳定和容易复现。