Week 6:闭环控制与避障逻辑实验
实验内容
本周学习了闭环控制、PID 控制思想,以及机器人根据传感器信息进行避障的基本方法。
理论题
1. 什么是闭环控制?
闭环控制是指系统会根据反馈信息不断调整输出。
例如机器人检测到前方距离变近时,会自动减速、停止或转向。
2. PID 控制中 P、I、D 分别表示什么?
P 表示比例控制,根据当前误差进行调整。
I 表示积分控制,根据过去误差累积进行修正。
D 表示微分控制,根据误差变化速度进行提前调整。
3. 避障逻辑的基本思路
机器人通过传感器检测前方距离。
如果前方没有障碍物,就继续前进;如果距离太近,就后退并转向,避免碰撞。
实践题
本周实践目标是修改避障逻辑,使机器人在遇到障碍物时执行:
后退 → 左转 → 后退 → 左转 → 后退 → 左转
实验代码
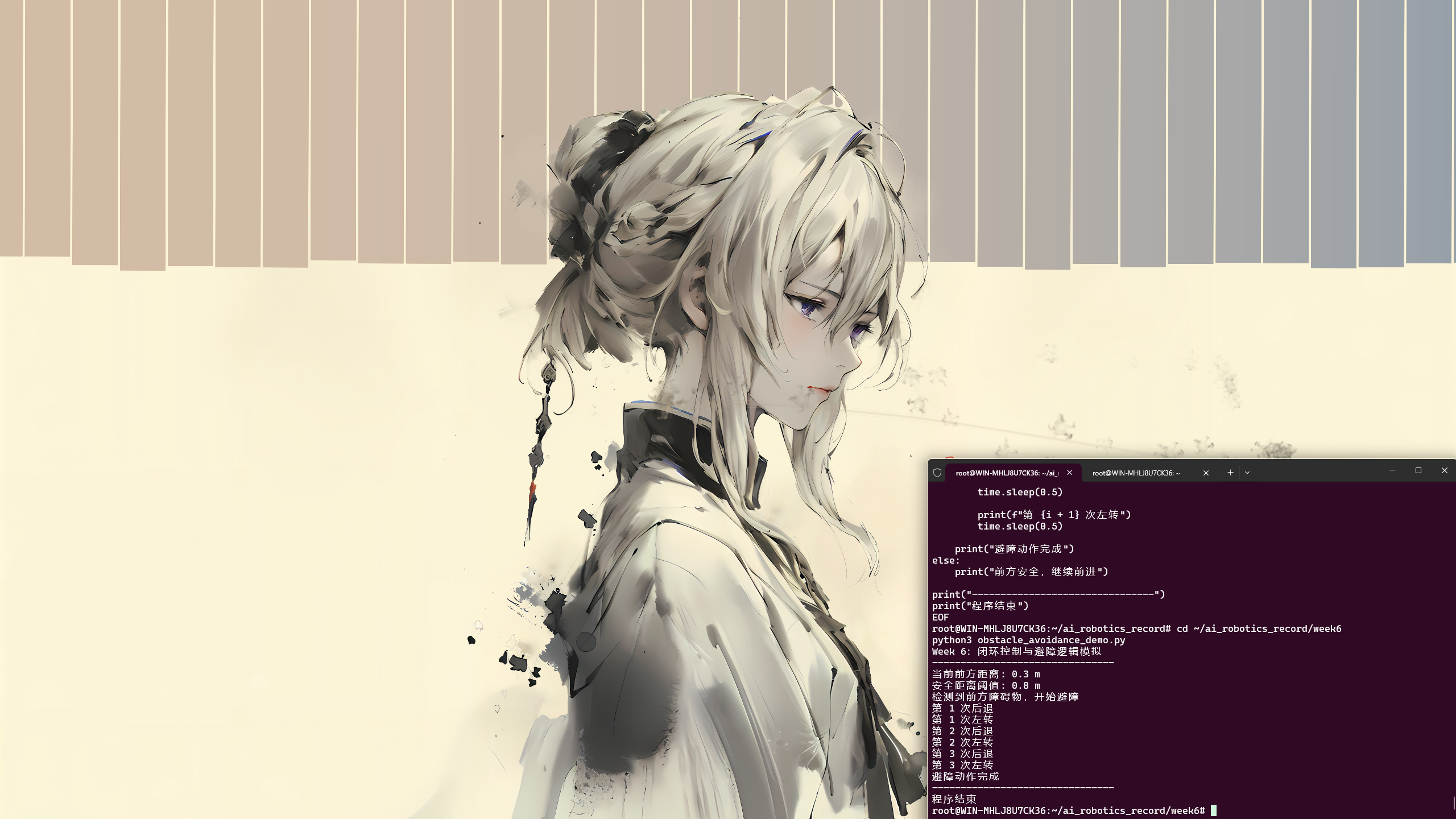
运行 Python 避障逻辑模拟程序:
python3 obstacle_avoidance_demo.py
实验截图
避障逻辑运行结果
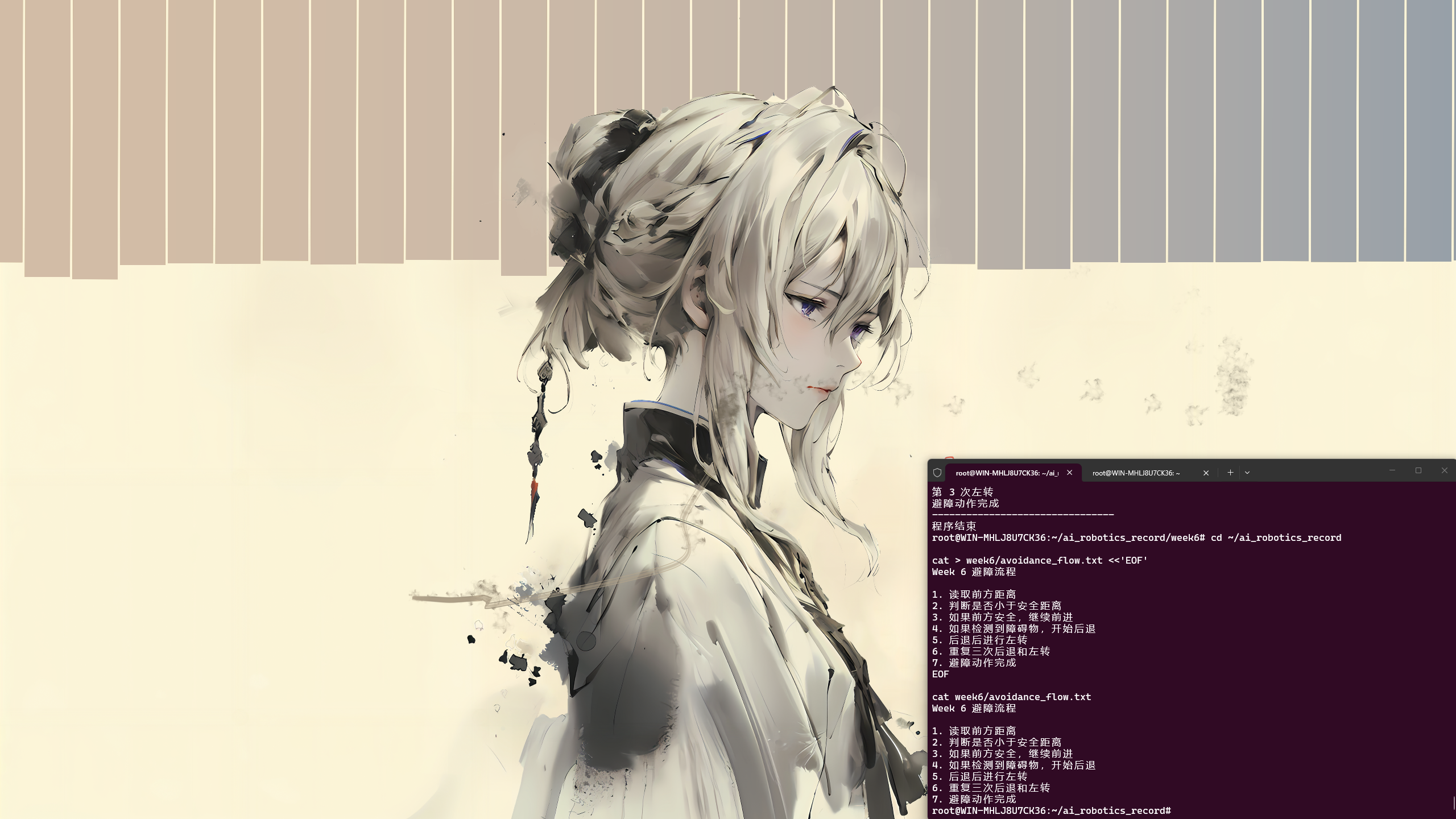
避障流程说明
总结
通过本周实验,我理解了闭环控制和 PID 控制的基本思想,并使用 Python 模拟了机器人遇到障碍物后的避障动作流程。